
社区发现算法
课程知识复习使用。
图中的社区是指一张图中的一些子图。这些子图内部顶点直接紧密相连,而子图内部节点与外部节点之间连接是稀疏的。社区发现算法是需要找到图中所有的社区,可以分为基于层级聚类的方法和基于边介数的方法。
1. 基于层级聚类的方法
- 点关联强度:衡量两点间的关联强度。
- 两点间独立路径数:能够连接两点的所有互不相交(没有公共节点)的简单路径总数,即为割点数目。
- 全路径融合强度:认为节点间的关联强度与所有路径都相关,路径长度越小,强度越大。
- 算法流程
- 选定并计算关联强度
- 初始化每个顶点为单个社区
- 定义两个社区的关联强度为其间所有点对的关键强度平均值
- 每次合并两个关联强度最大的点对,合并关系形成层级关系
- 聚类质量达到一定程度之后不再继续
- 衡量标准:模块度,是评估社区结果质量高低的度量方法。模块度Q 计算如下:
$$Q \propto \sum_{s\in S} [ 社区s内部的实际边数 - 社区s内部的期望边数 ] $$
模块度取值范围为[-1,1],实践中,模块度达到0.3到0.7之间就说明划分质量很好。
不足:对度数低的点的社区分配不友好。例如一个顶点如果只有一条边,则这个顶点理应分配在其唯一邻居所在的社区,然后基于层级聚类的方法中,该点同邻居的关联强度低,很容易被排斥在邻居所属社区之外。
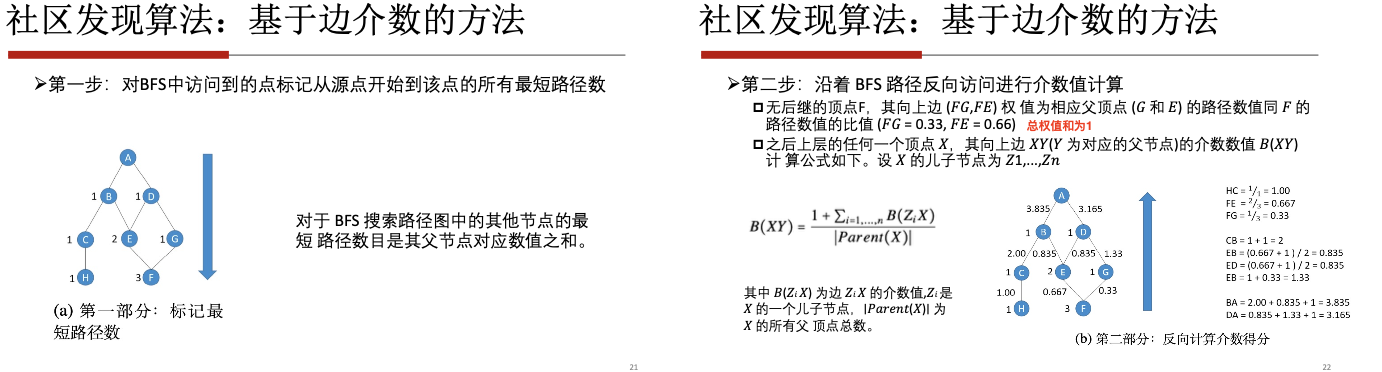
2. 基于边介数的方法
- 边介数:对于图上的一条边 $e$ 而言,$e$ 的介数是指图中所有点对的最短路径中,要经$e$ 的路径比例总和。
- 算法流程:
- 计算所有边的介数
- 移除介数最高边
- 重新计算所有边的介数
- 如果剩余所有边的介数都低于一定阈值则终止,否则回到步骤二
3. 其它社区发现算法:BK,k-clique,k-core
-
团(完全图):任意两个节点间都连接有边。
-
最大团:一个图中顶点数最多的团
-
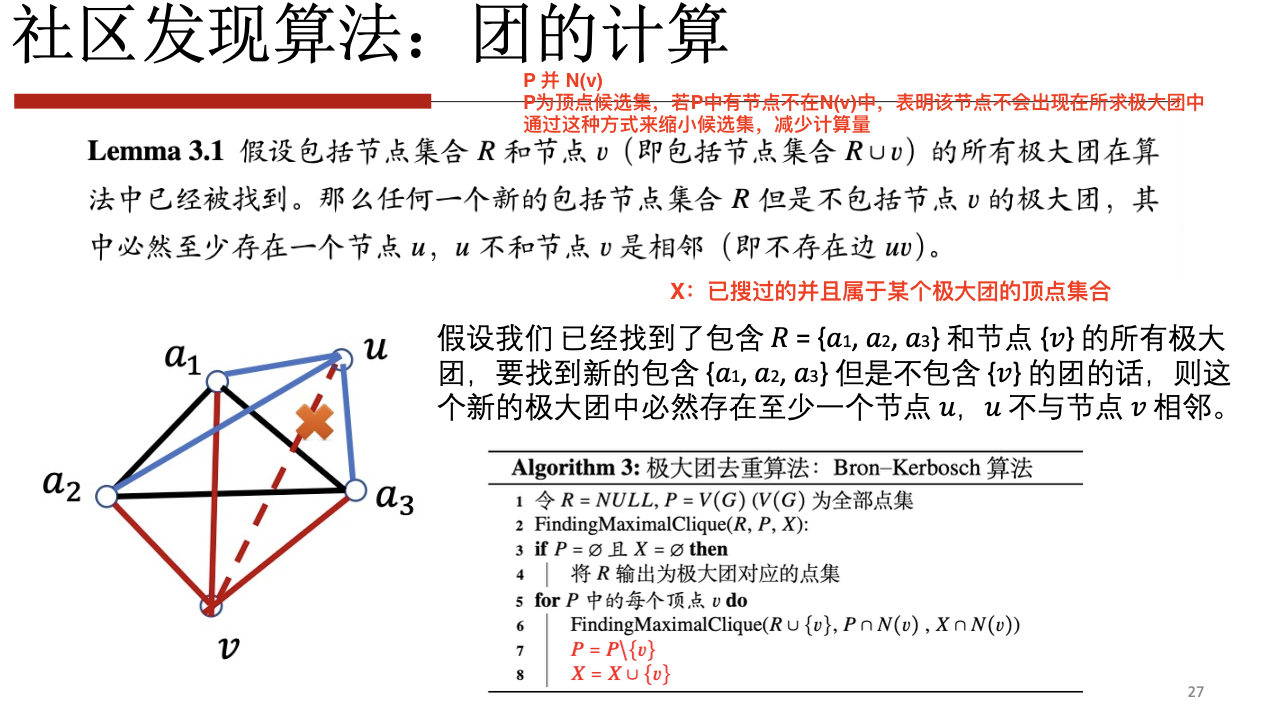
极大团:加入任何其它顶点都无法在图中构成更大的完全子图的团
-
BK算法求解极大团:
-
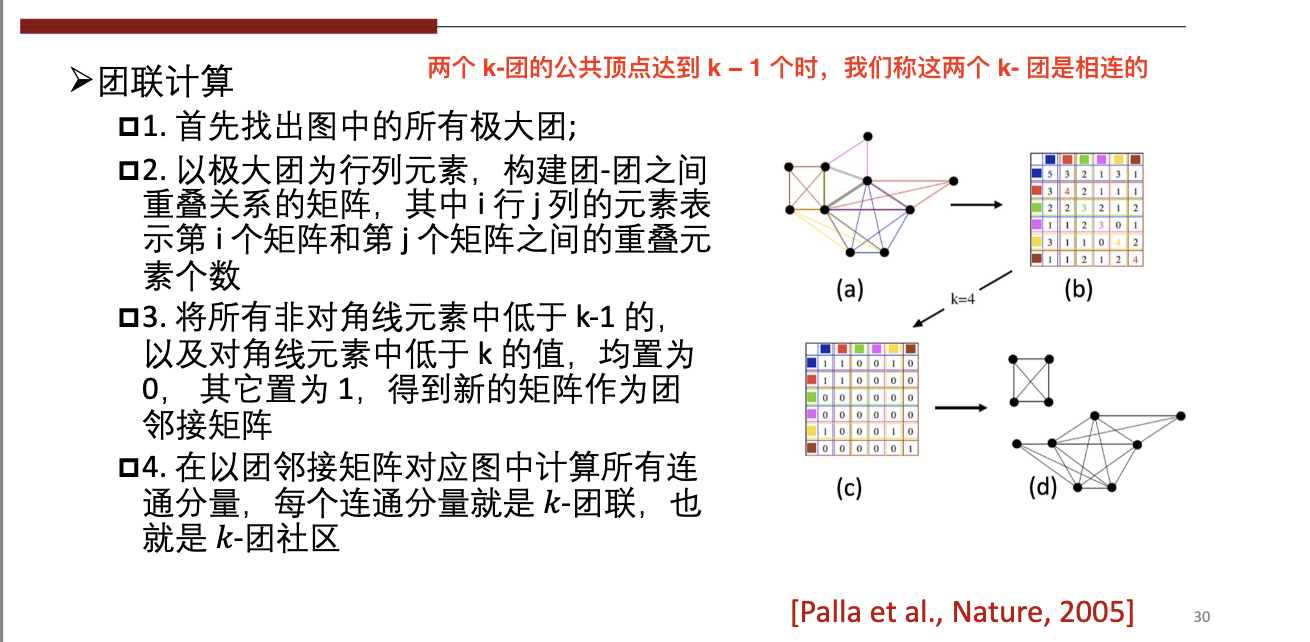
k-clique算法,允许社区重叠,将发现的社区定义为团联。给定一个大于1的正整数k,由一系列k-团(节点数目为k的团)互相连接形成的子图称为k-团联。
-
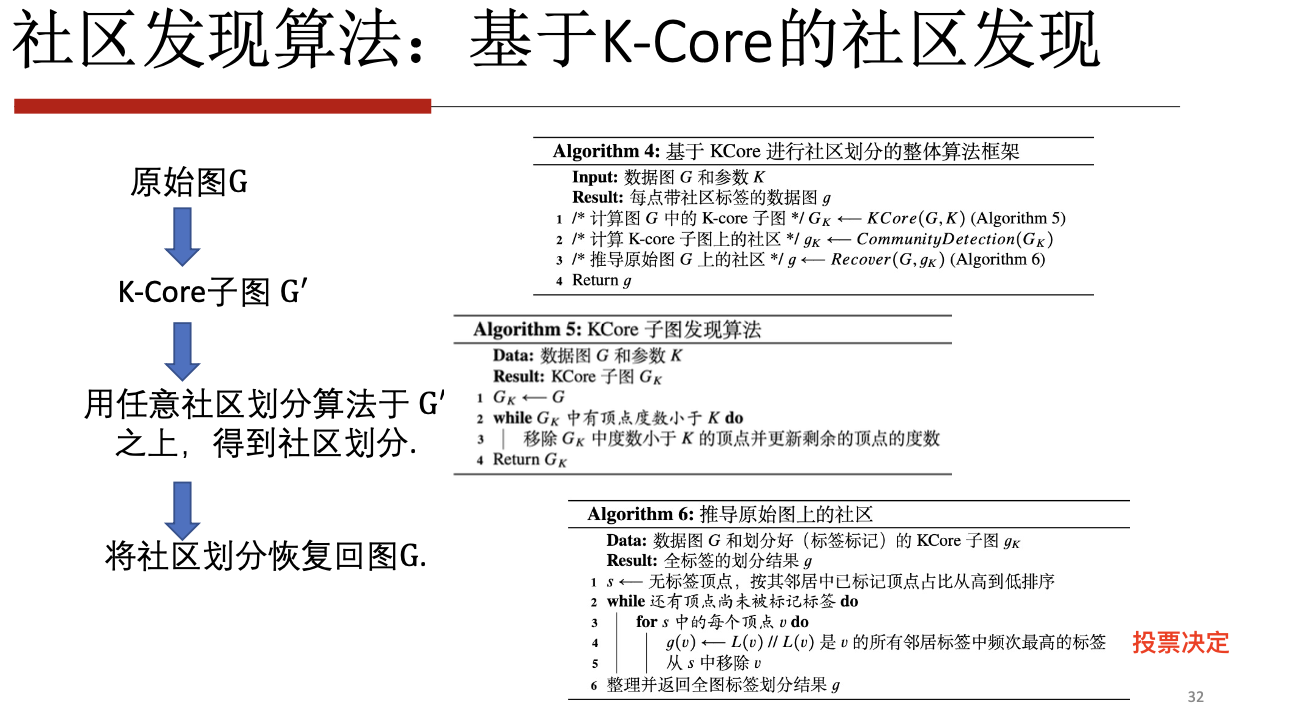
k-core算法:子图是连通的,且每个节点的度数均不小于k。
4. 社区搜索
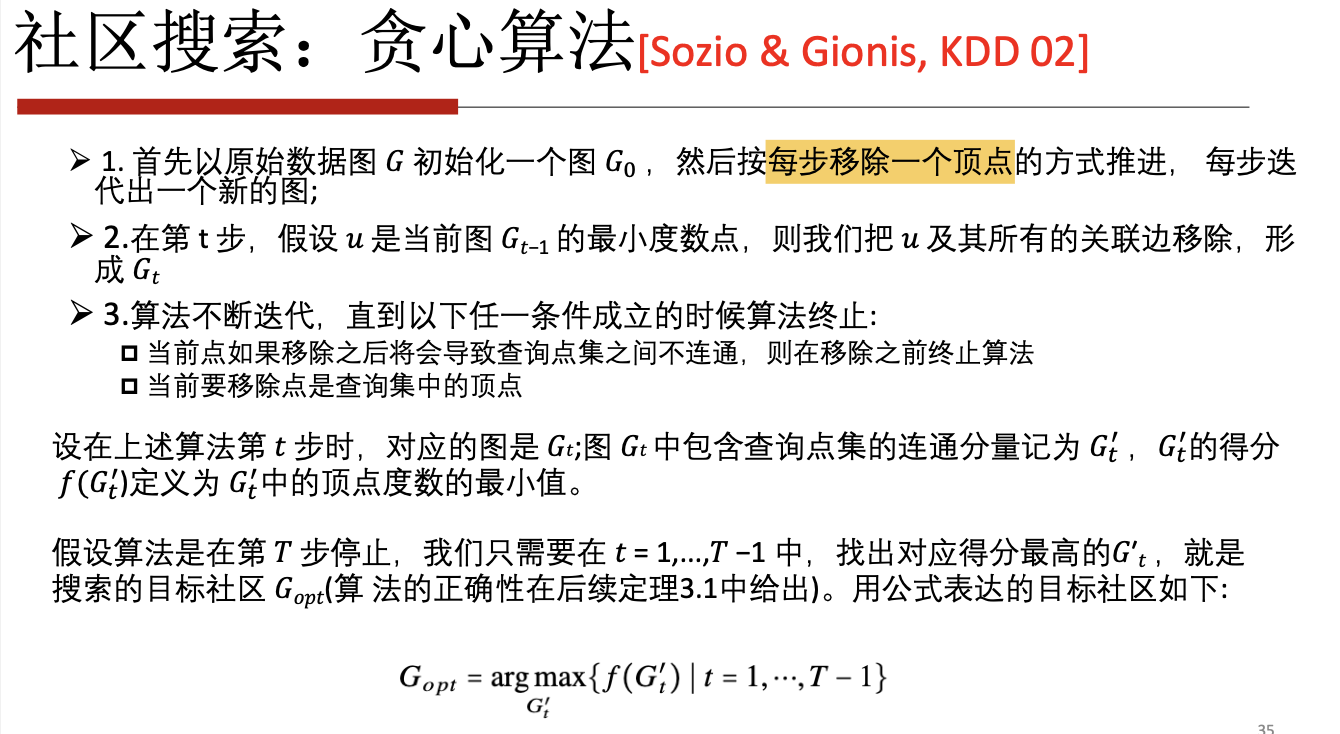
社区发现是为了找到图G中所有的社区,然而社区搜索只需找到用户所关心的社区,如找到包含用户输入的查询点/查询点集合的社区。即在图G中找到一个连通子图H,且$f(H)$在所有可能子图的得分函数中值最大。得分函数$f(H)$定义为H中最小的节点度数。
-
贪心算法
-
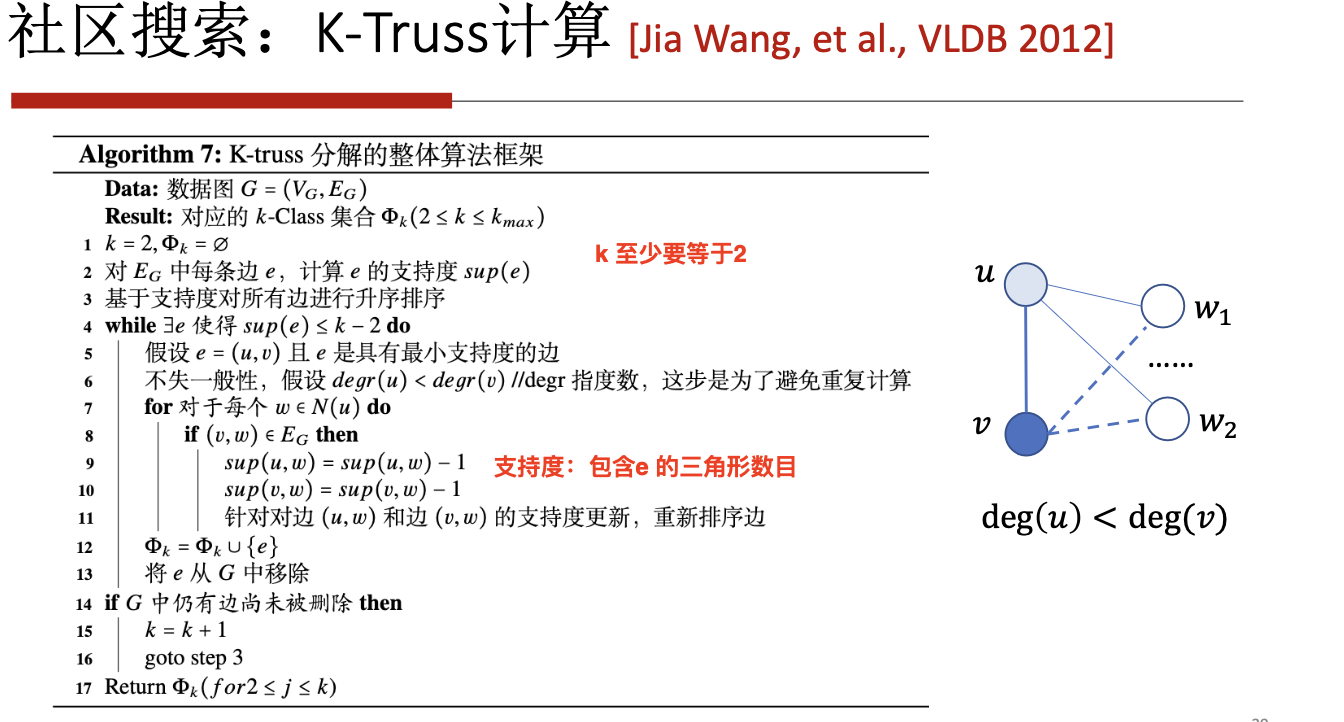
K-Truss算法:K-Truss要求子图H中任意一条边都被包含在至少(k-2)个不同的三角形中。
- 支持度,$sup(e,G)$:包含e的三⻆形数目
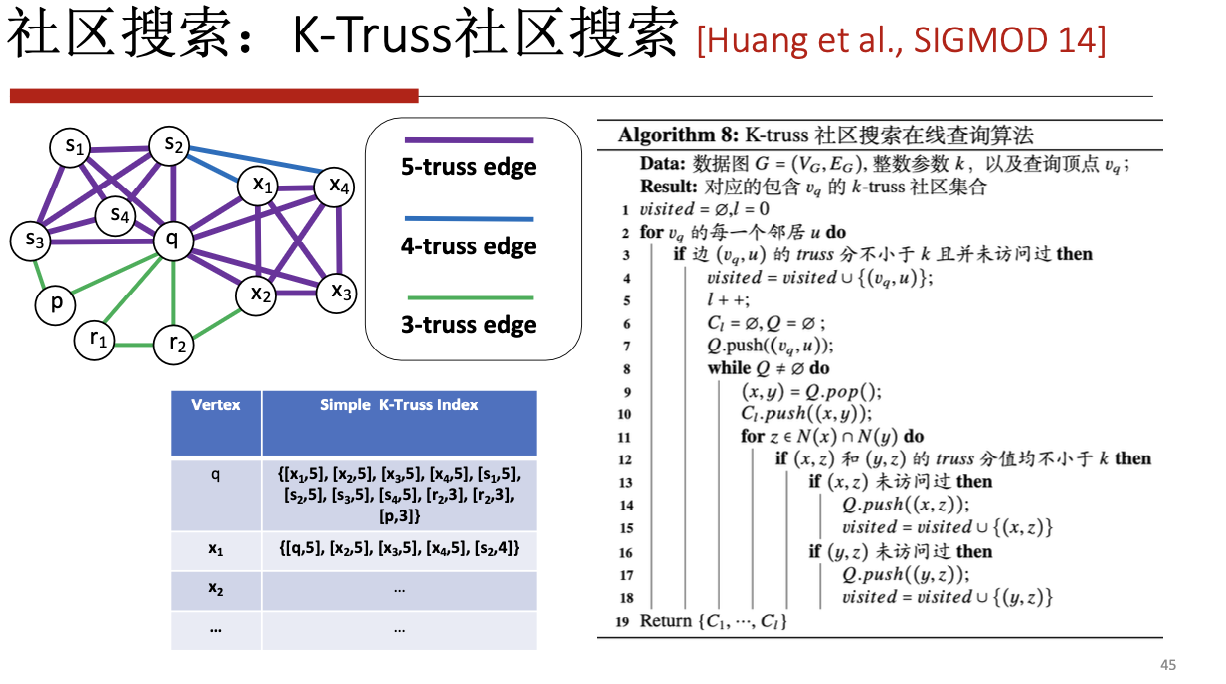
- 子图 Trussness:子图H中所有边的最小支持度
- 边 Trussness:边e所在所有子图中最大的子图 Trussness
- k 分类:图G中所有边 Trussness 为k 的边集合
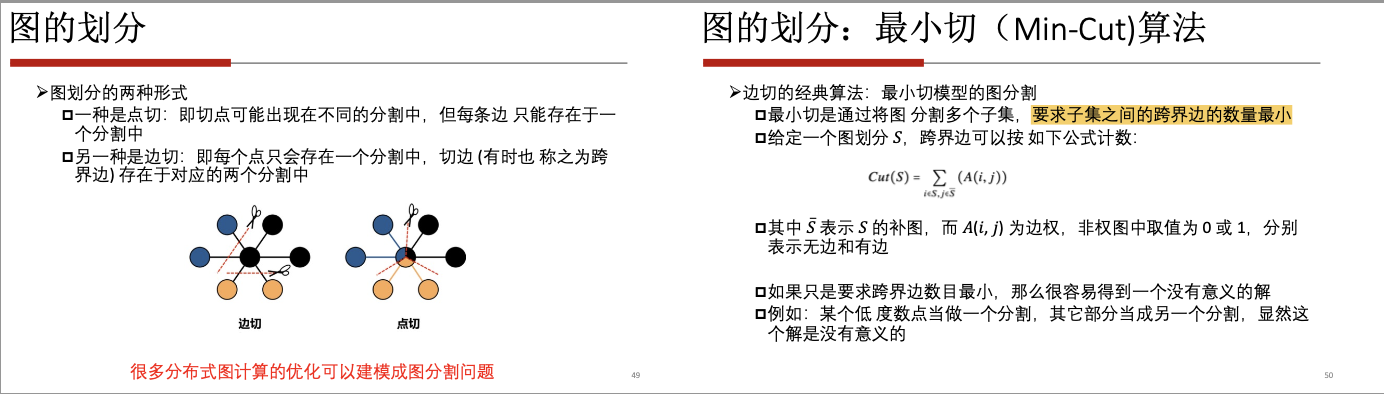
5. 图划分
图的划分是将图切分为多个不相交的子集,每个子集称为一个分割,并希望各个子图的大小要相对均衡。
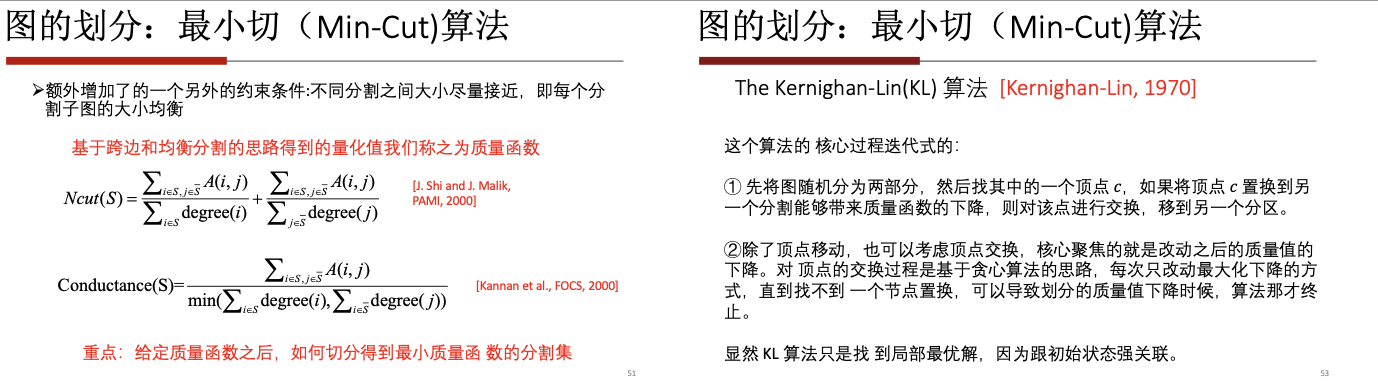
KL 算法最大的问题是可扩展性太差,对于大图考虑所有可能的节点置换的时间复杂性太高。一种改进的算法则是METIS 算法: 通过对基于点边的融合来不断压缩原始图,当原图小到一定程度之后,再进行KL 等图分割算法,最后基于分割结果进行原图恢复。
6.参考资料
中国科学院大学邹磊老师,图数据管理与应用课程课件